Maintenant que les principaux concepts sont maîtrisés, nous savons que pour mettre en œuvre un système de vision performant, surtout s’il est destiné à être embarqué, il est nécessaire d’utiliser les technologies les plus récentes afin de bénéficier des puissances de calcul adaptatives et des systèmes évolutifs.
Par exemple, si le capteur d’image est un capteur de 2M pixels, fonctionnant à 25 images / seconde, il devra traiter 2 millions de pixels x 25, soit 50 millions de pixels / seconde (ceci est approximatif et ne sert qu’à donner une idée de la capacité de calcul nécessaire).
L’objectif est de faire fonctionner le système en temps réel et de le faire interagir avec son environnement.
Chez Nexvision, nous n’hésitons pas à mettre en œuvre les dernières technologies issues des laboratoires, qu’il s’agisse de capteurs d’images, de processeurs graphiques ou de tout autre type de composants.
Nous sommes d’ailleurs l’une des rares entreprises en Europe à avoir été les premiers à adopter les GPU de Nvidia, et nous avons travaillé en étroite collaboration avec Photonis pour développer leurs capteurs EBCMOS pour la vision nocturne.
Nous ne développons pas seulement des systèmes complets, en commençant par les capteurs d’images, mais nous incluons également le développement d’un système complet sur mesure qui va avec, c’est-à-dire le matériel ainsi que le logiciel, y compris les algorithmes de traitement et/ou d’analyse d’images.
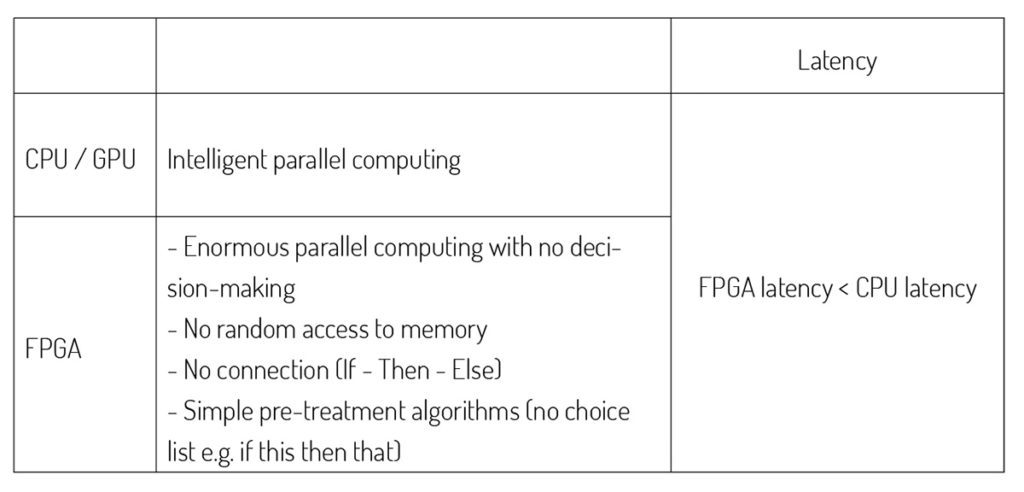
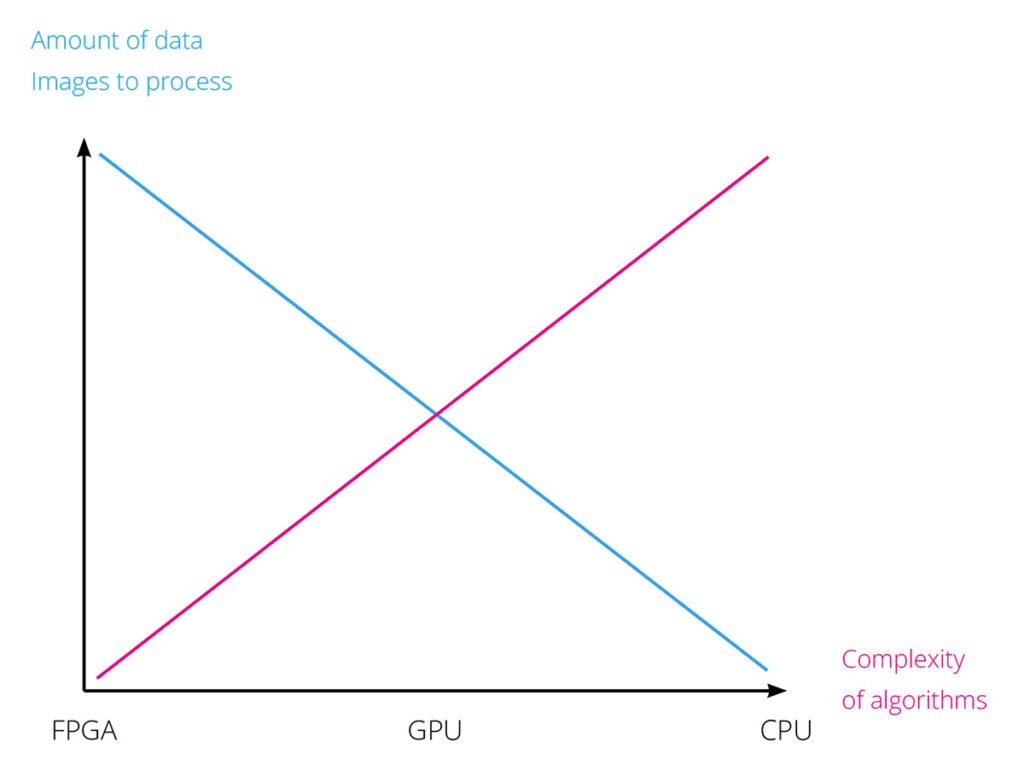
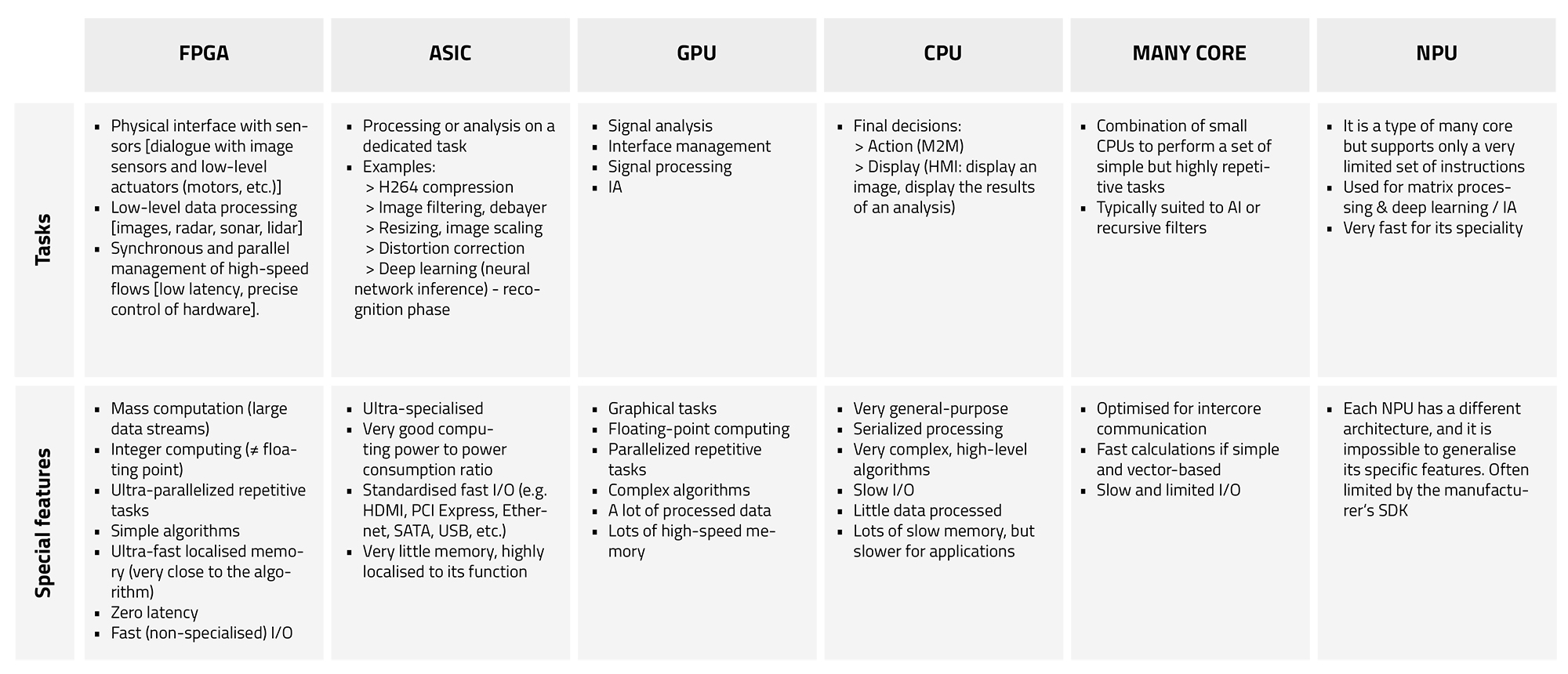
Dans la plupart des cas, nous créons des conceptions électroniques embarquées où le CPU, le GPU, le NPU et le FPGA constituent le cœur du système et la puissance de calcul.